ラグランジュ関数
ラグランジュ関数
速度 で運動している質量
で運動している質量![]() の運動エネルギー
の運動エネルギー![]()
これの変分を考えてみましょう。簡単のために運動は![]() 軸方向のみを考え、そのずれの時間を
軸方向のみを考え、そのずれの時間を![]() から
から![]() とします。
とします。
まず、![]() 自体の時間に対する変分と微分の関係を求めます。
自体の時間に対する変分と微分の関係を求めます。
さらに運動エネルギー![]() の変分を考えれば、
の変分を考えれば、

この出てきた上記![]() の式に関して両辺を
の式に関して両辺を![]() で積分します。
で積分します。
さらに上記積分式の右辺の![]() の
の![]() のみ以下のように微分表記にします。
のみ以下のように微分表記にします。
ここで微分と変分の入れ替えが可能なので次のようになります。
上記式の右辺に対してさらに部分積分を適用しますが、この時右辺の積分に関しては端点を固定しているので結果![]() になることに注意すれば以下のようになります。
になることに注意すれば以下のようになります。

となるので次のように求まります。

力がポテンシャルエネルギー![]() などの保存力だった場合は、
などの保存力だった場合は、
そしてこれの変分を考えれば、
これを部分積分の結果に代入します。
途中微分と変分を入れ替えています。
さらに以下のように式変形をしていきます。
このように停留値をとらせるようなものになっており、実現される運動はこれを満たすものだと考えることが出来ます。
ここでこの![]() を
を![]() とおき、オイラーの方程式と対応させれば、
とおき、オイラーの方程式と対応させれば、


これより以下のような式が決まります。

これを![]() に拡張すれば、
に拡張すれば、
またさらにここで![]() を
を![]() と表せば、
と表せば、

一般化運動量は、
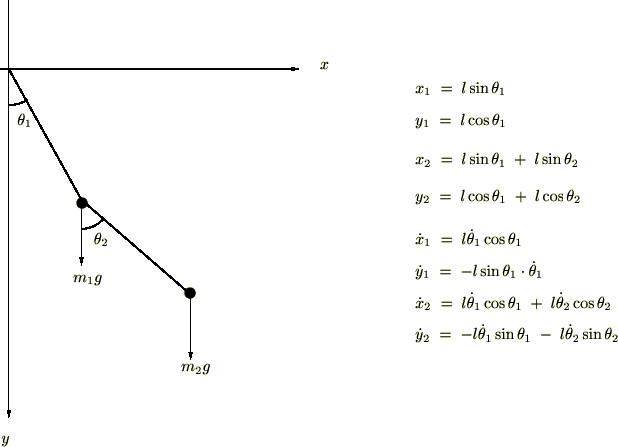
ある質点の運動
ある質点![]() の運動を考えてみましょう。
の運動を考えてみましょう。
![]() を水平面とし
を水平面とし![]() を鉛直上向きに座標を取ります。
を鉛直上向きに座標を取ります。
そうするとラグランジアンは、

となるのでこれをラグランジュの式に当てはめれば、


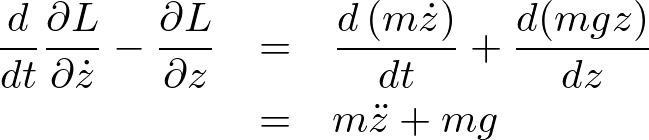
となるので結果は次のようになります。
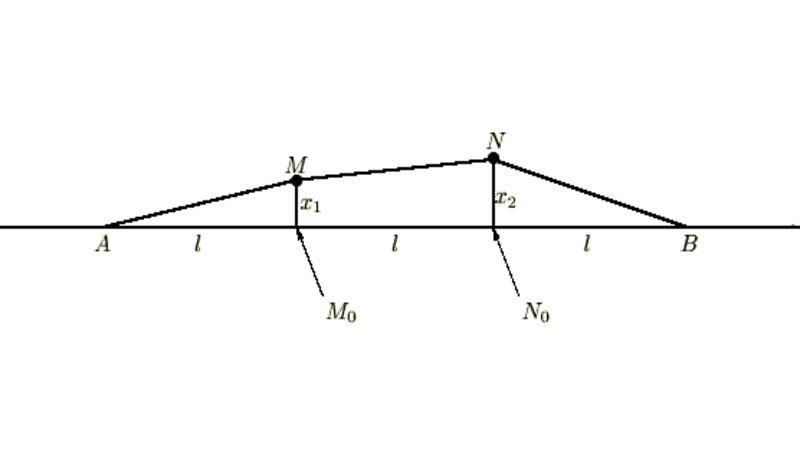
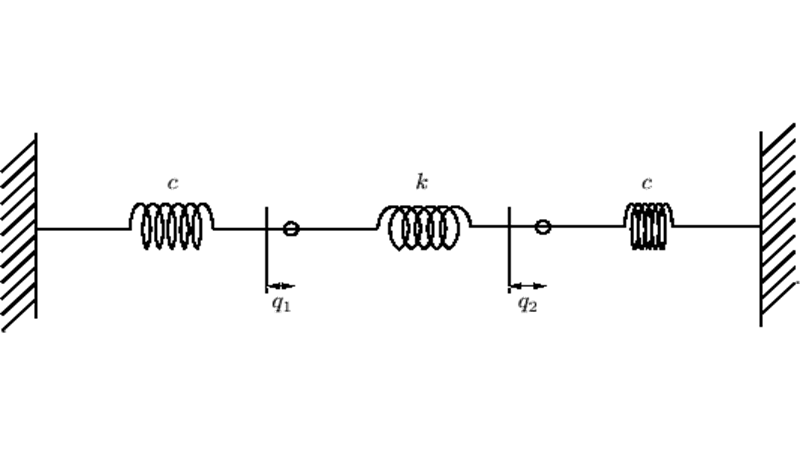
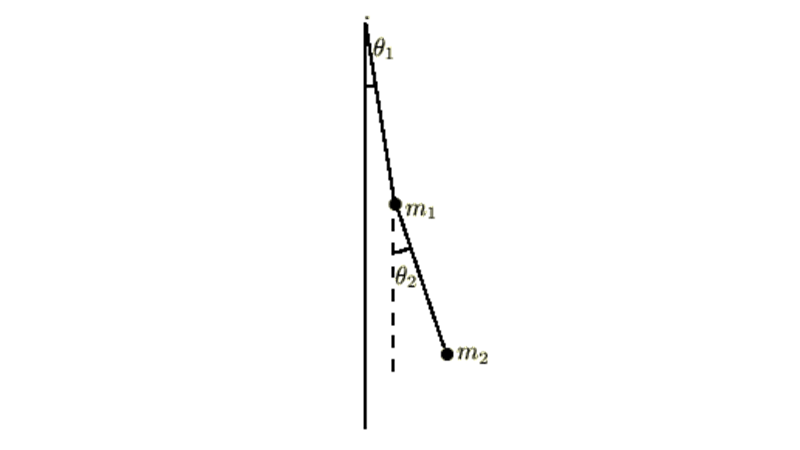
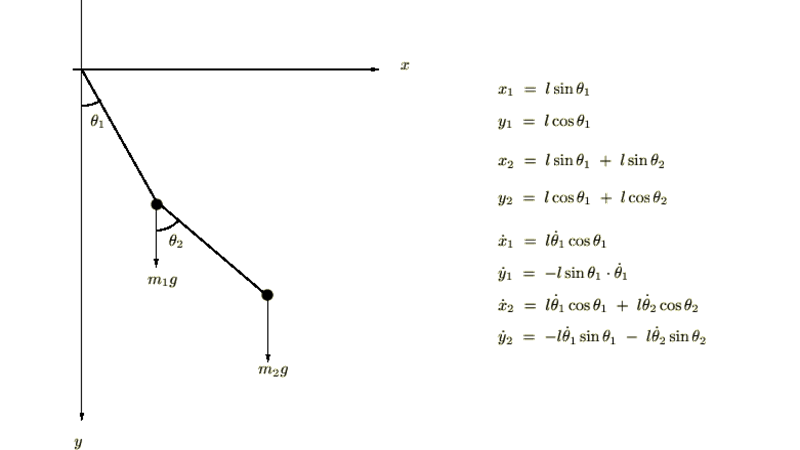
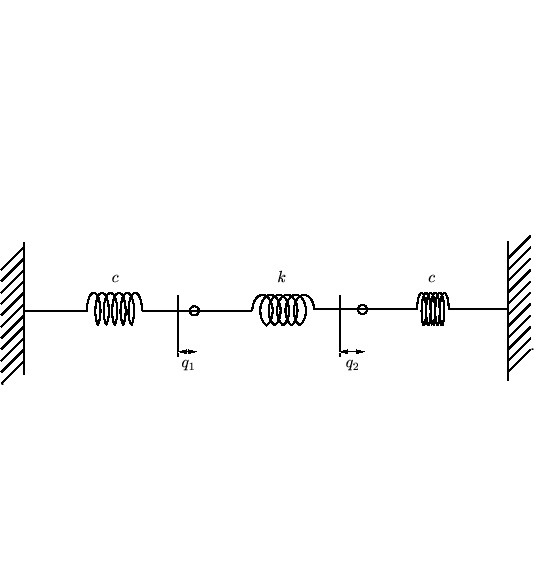
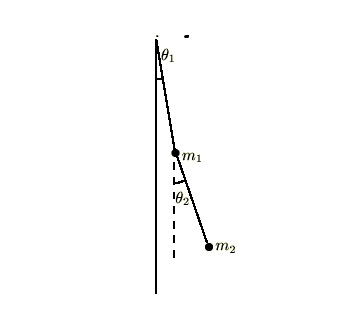
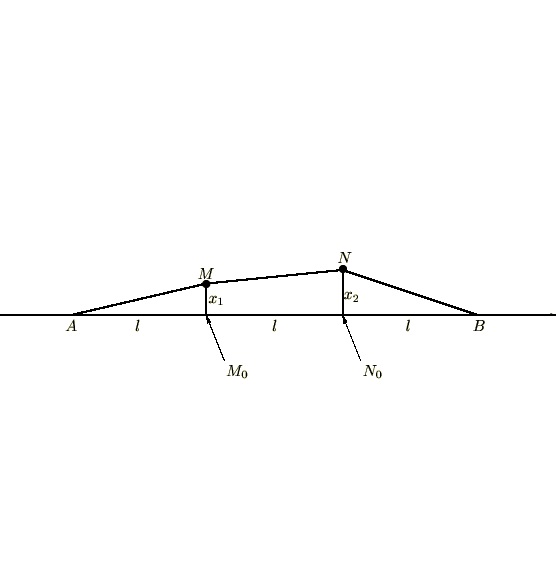
このカテゴリーではラグランジュ関数を使った弦及び3重ばねの連成振動、2重振り子の微小な場合とそうでない場合の考察を行っていきます。